Arduino-Uno を使ったBLDCモーター制御。
今回は、Arduino-Uno を使ったBLDCモーター制御回路にて、BLDCモーターを回してみました。
BLDCモーターは3相のスター結線で、中性線は有りません。以下に、回路図を示します。回路図はあくまでも参考として、実際に使用しているパーツは回路図とは異なります。
以下サイト情報で検索すれば、元ネタは確認できると思います。 サイト情報 https://simple-circuit.com/arduino-sensorless-bldc-motor-controller-esc
-1024x768.jpg)
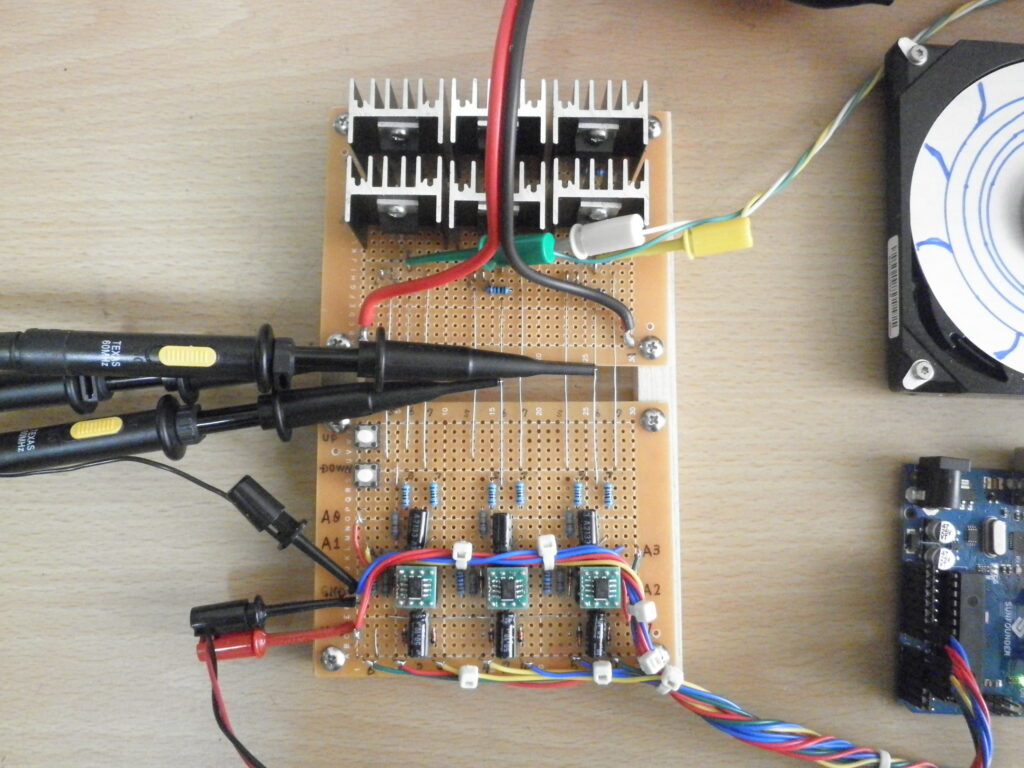
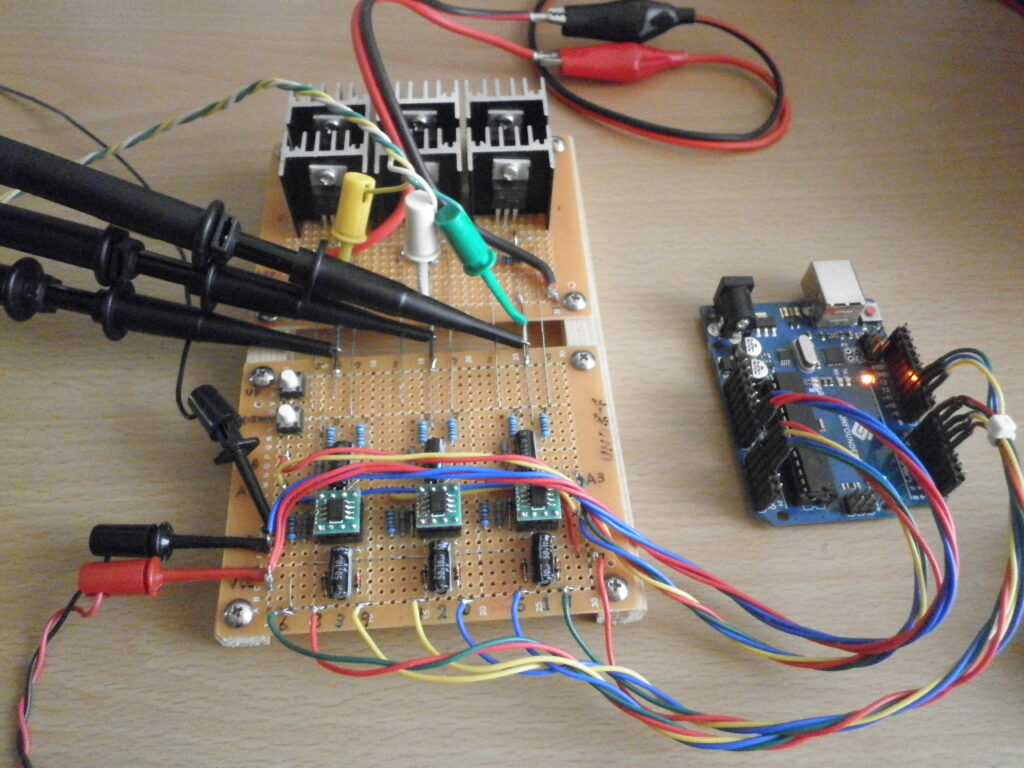
今回、回路を製作するにあたり、入手したFETの不良や、ハーフブリッジドライバの入力条件、Arduino-Uno のコンパレータ不良等々、色々と苦労しました。最終的に回転させること、正転・逆転の確認もできて安堵してます。今回は、自身はFETをディスクリートとし、ハーフブリッジドライバも回路図とは異なる物を使用しました。ハーフブリッジドライバは回路図同様ブートストラップ回路を使用してます。基本構成は変えていません。FETはすべてN-ch CMOS FET です。ハイサイド・ローサイドとも同じ物です。
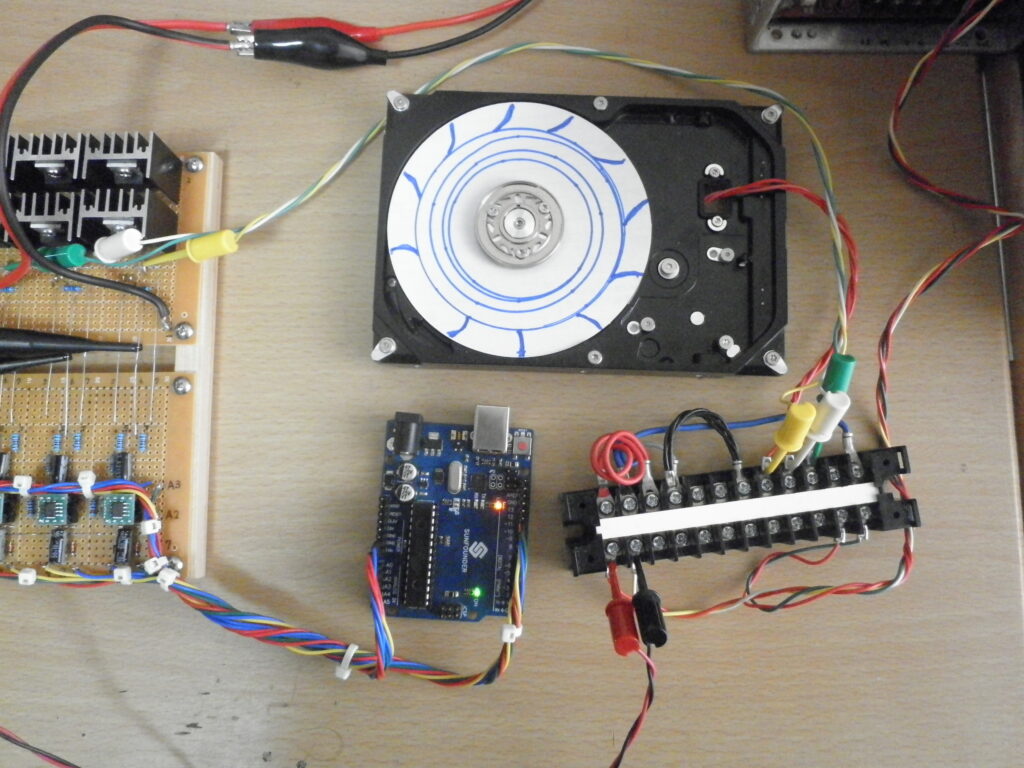
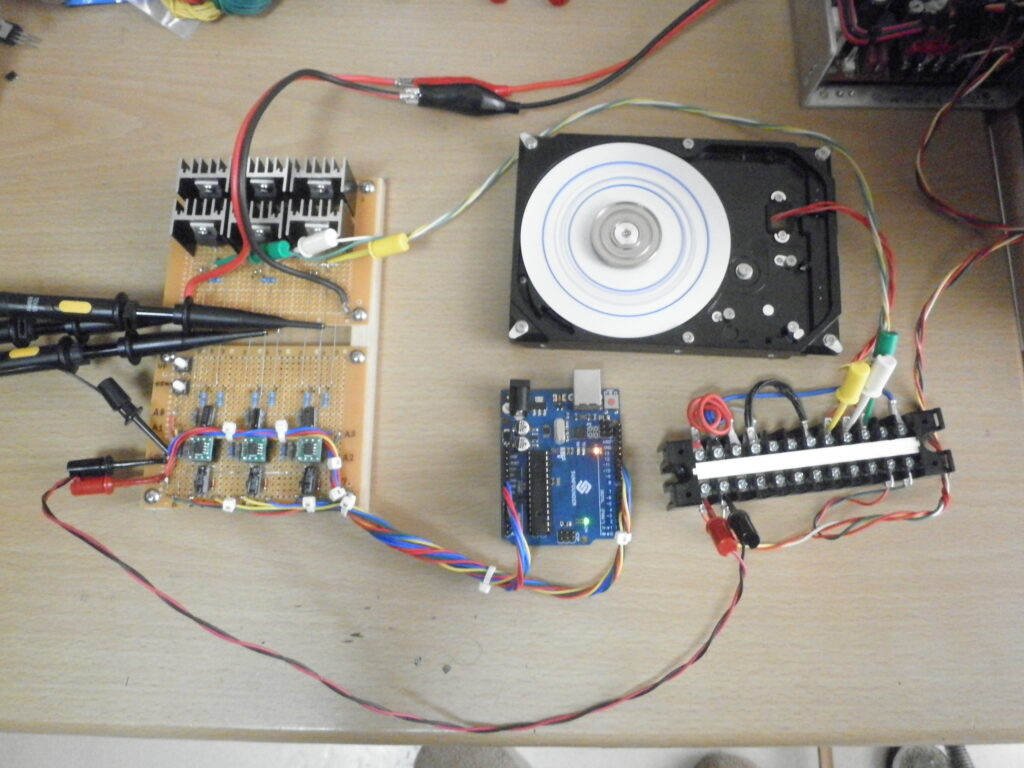
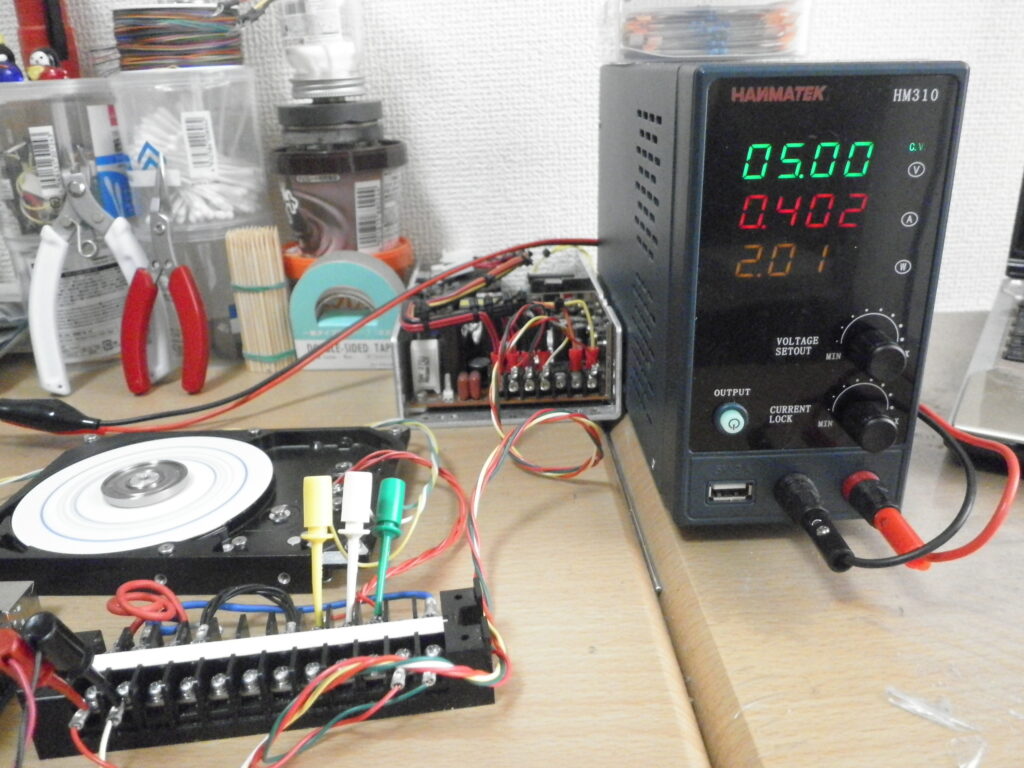
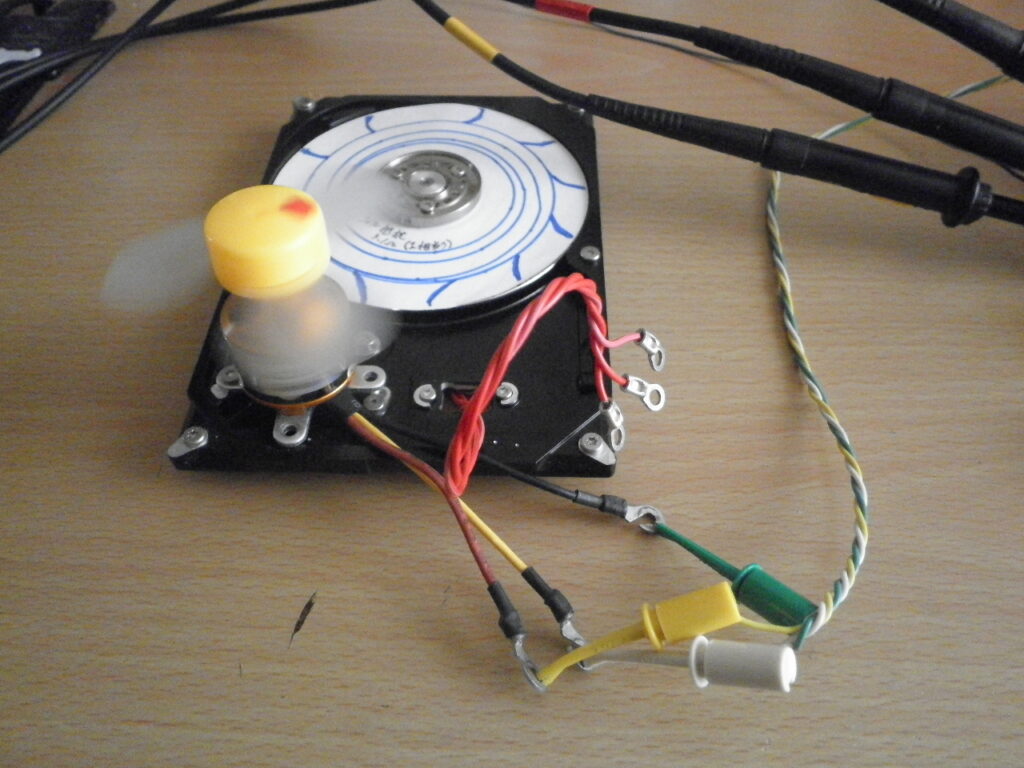
今回回転させるモーターはHDD内のBLDCモーターとしました。BLDCモーターへの配線は画像中の黄・白・緑の電線でつないでます。一度端子台で受けてます。ハーフブリッジドライバの電源は12Vとしてます。Arduino-Unoの電源も12Vとし、Vinにつないでます。FETへの電源供給を別回路として、5Vから12Vの可変電圧が掛けられるよう工夫してます。FETの電圧を変化させてもBLDCモーターが正常に回転することを確認してます。
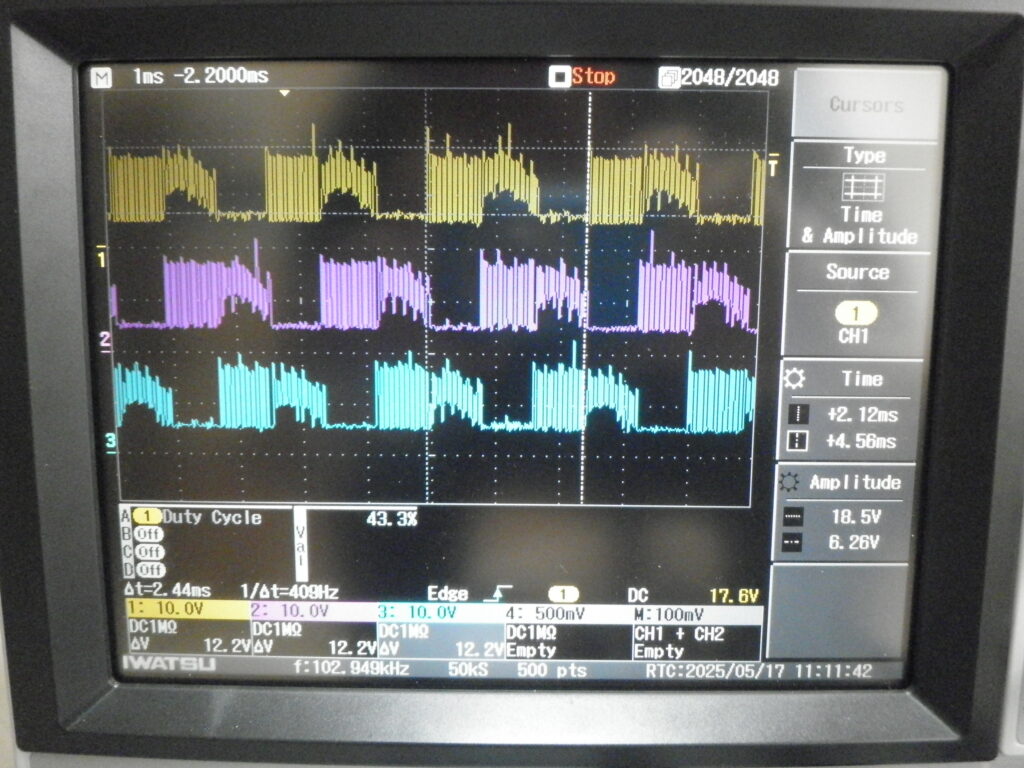
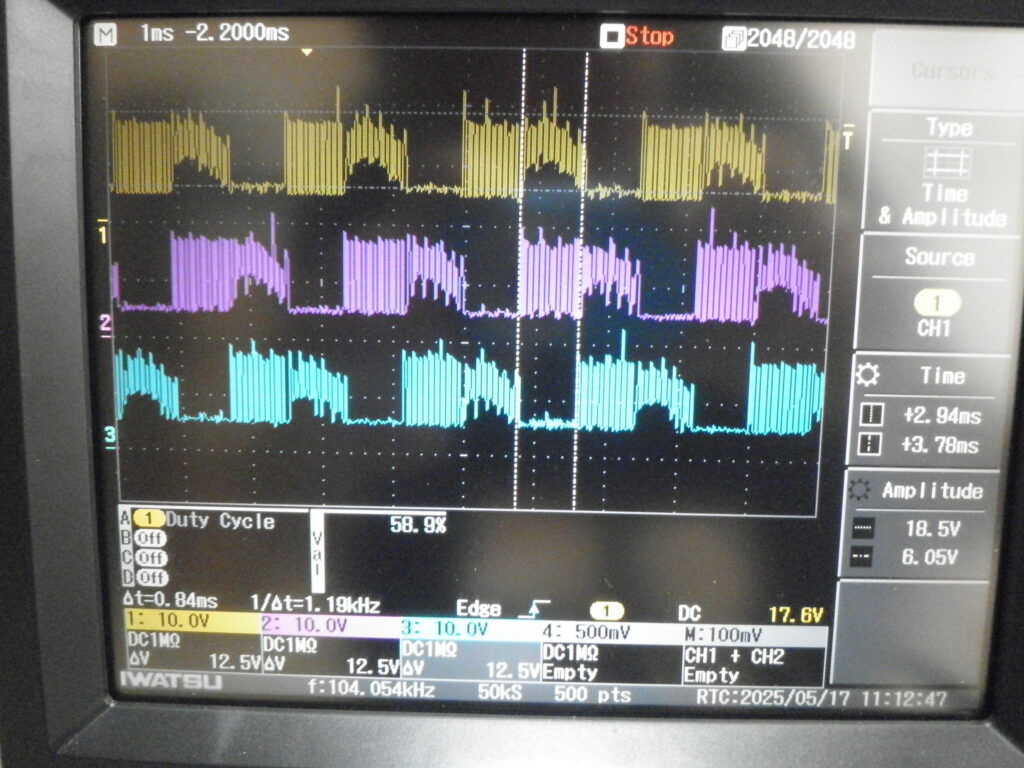
次に、FETへの電源電圧を5Vとした時のBLDCモーターへの出力波形を観測してみましたので画像として載せます。




以上の画像で判るように、位相差は各chともほぼ同じで、120度ずつズレてくれてるようです。 次にFETへの電源電圧を12Vとして波形を観測しました。これも画像として載せておきます。
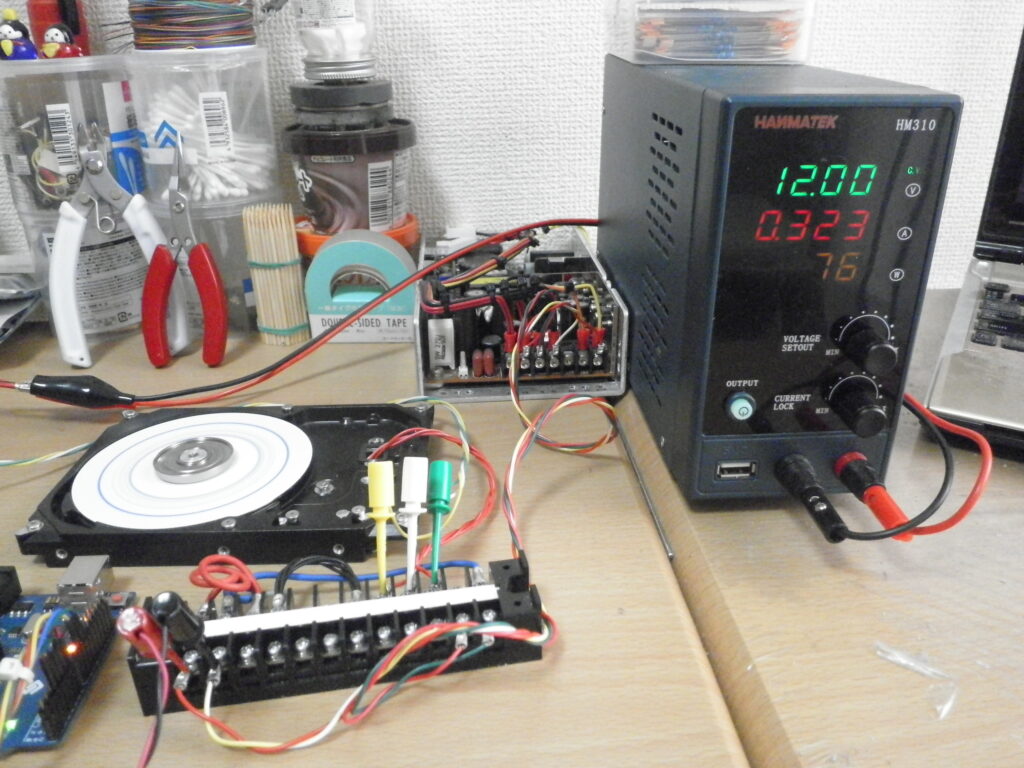
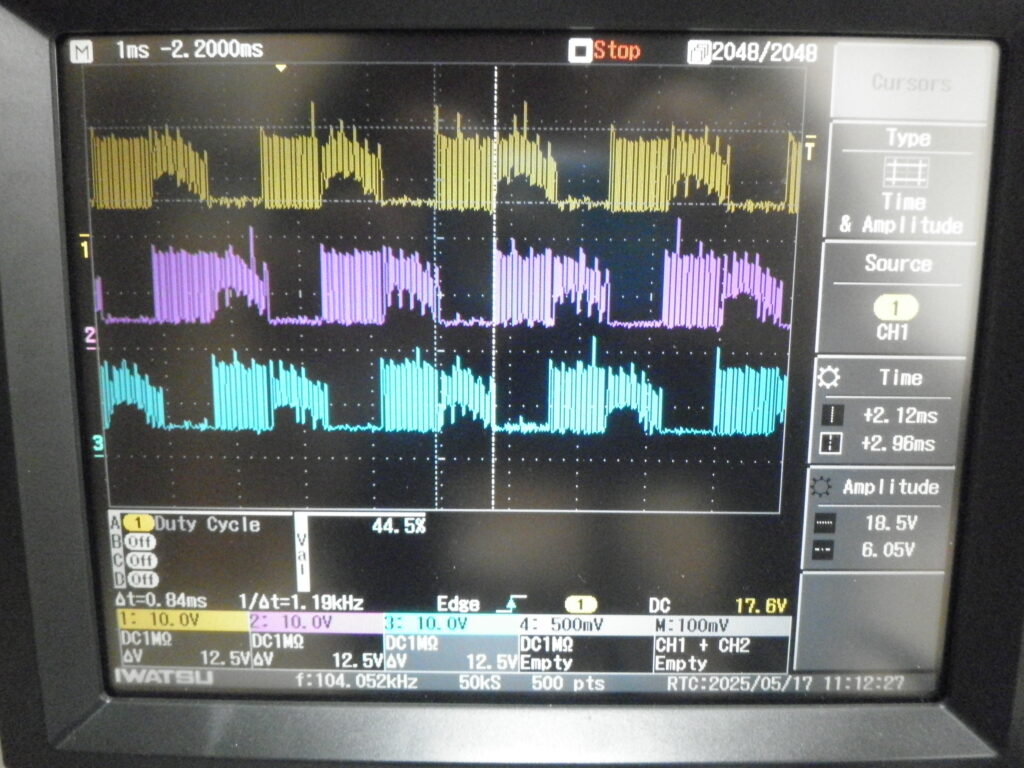
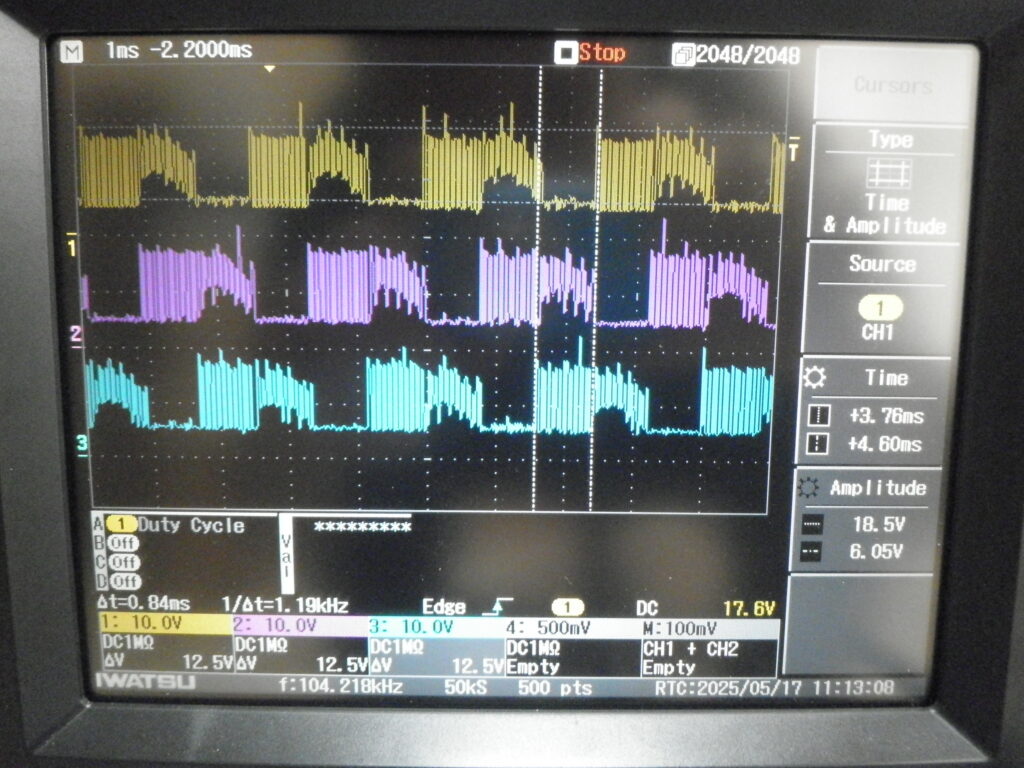
以上の画像で判るように、12V電源時であっても位相差は各chともほぼ同じで、120度ずつズレてくれてるようです。
この他、問題は多々あるのですが取り敢えずホッしました!!
今回自身が変更使用したパーツが以下2点です。
FET 当初 06N03LA(N-ChチップFET) → 現状 IRFZ44N(N-ChディスクリートFET) ハーフブリッジドライバ 当初 IR2104S → 現状 IRS2003
コンパレータ不良が判明して、以下を交換。
Arduino-Uno Atmega328P(コンパレータ不良) → Atmega328P(コンパレータ良品)
※ コンパレータ良品・不良品についてはコンパレータの動作確認ができるSketchが公開されていましたので、それを使 用しました。
その他、FET IRFZ44N(N-ChディスクリートFET) が、1個壊れて交換。 Arduino-Unoボードが通信不良となって
結局、ボードを新品に交換。(やれやれ。w(ー-);w)
最後にFETへの電源電圧を12VとしてBLDCモーターが回転を開始する様子を動画にしましたので、載せておきます。
・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
* 以降、日を空けて、+αで、FETへの電源電圧を5V以下(実際には0.5V)に設定して、モーターも変更して動作確認を行いました。
動作確認をするにあたり、全くの別回路でしばらく使用してたら、ハーフブリッジドライバ1個とFET1個が壊れていました。(泣)よって、交換となりました。
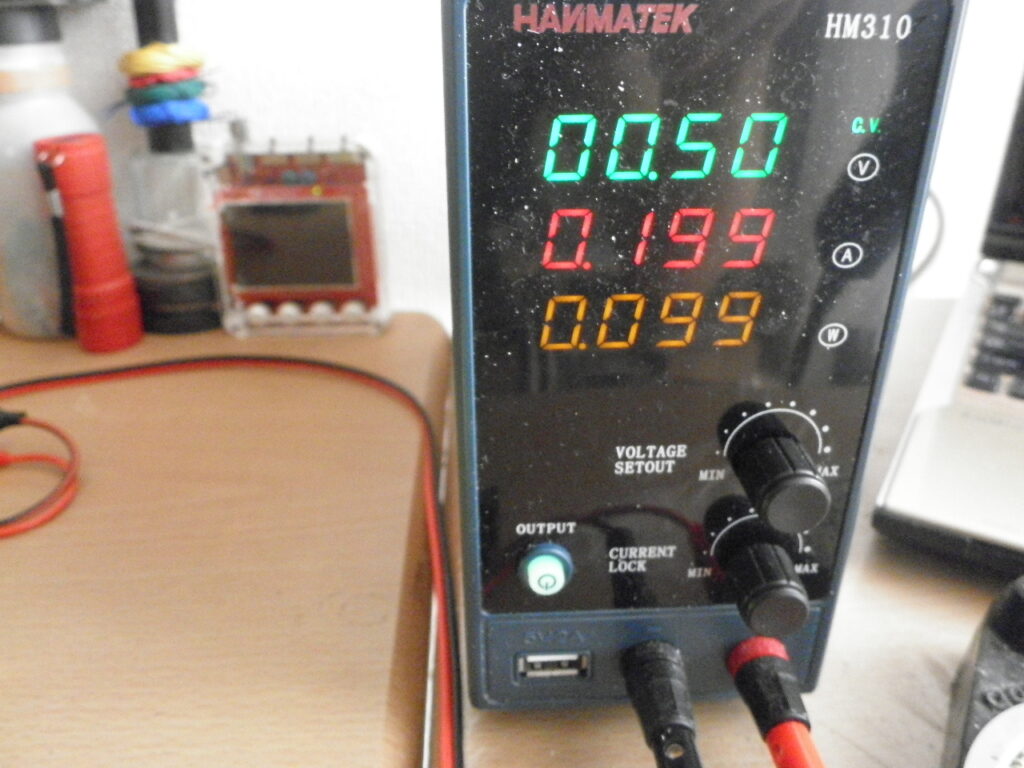

今回、FETの電源電圧がどこまで落とせるのか実験しました。
動画として、0.5V、0.4Vの両方をUPします。
実際には0.33Vまで動作可能でした。(この時の周波数は27.8Hzでした)
今後、機会があれば新たにドライバボードを製作し、UPしようと思います。
Follow me!